こんにちは!総務のクドウです。
芳和システムデザインで社員の絆を深めるため、ほぼ毎月開催しているサークル活動。
今回はその中で、ものづくりが好きな社員が集まって結成した「ロボット部」をご紹介いたします!
前回のサークル活動は「登山部」でした、詳しくはコチラをどうぞ。
さて、まずはロボットを用意しょう!って話し合っていたら、とある部員がポチっと購入してしまいました。
はるばる海外から届いたロボットのー。

ダンボール開封!
中の物を全部だし、いざ組み立てを開始しました。
するとある部員が気づきました。
「あれ?説明書がない・・・。」

全員「・・・・。(沈黙)」
クドウ「どうしようか・・・。」
部員A「無いなら無いで調べてやってみようか」
で、ロボット開発がスタートしました。
【手順】
1.骨組みとなる部品を決める
2.サーボを骨組みの間に配置
3.ネジ、ケーブルなどの細かな部品を決める
4.組み立て

1.骨組みとなる部品を決める
手と足は形が分かりやすいので、最初に配置し、その間を完成図を見ながら、置いて行きます。
2.サーボを骨組みの間に配置
サーボは電気で回転する方(金属でできたエヘン虫みたいなギザギザの丸)の位置をそれぞれ揃えます。
3.ネジ、ケーブルなどの細かな部品を決める
サーボのネジ穴に合う木ネジを選び、その次にサーボにつける丁度いい長さのケーブルを決めます。(このケーブルの先は最後にボードにつけるので一旦そのままで)
4.組み立て
あとは、コツコツ精密ドライバーで組み立てます。

細かい作業になると夢中になってしまうBさん、完成図を見つつ黙々。
そして組み立てること4時間・・・。
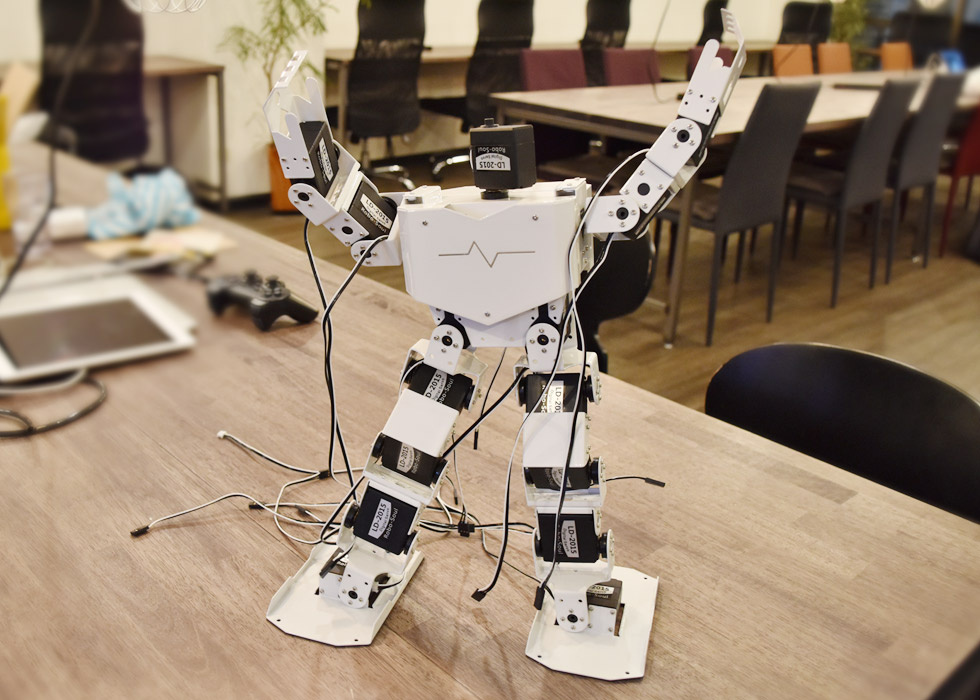
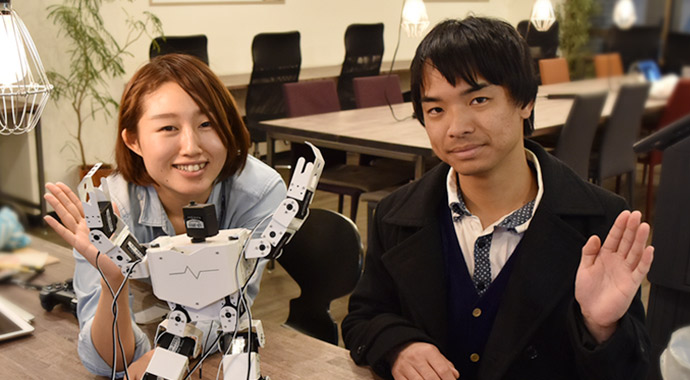
完成しましたー!
クドウ「伸びまくっているコードがフリンジ衣装みたいで可愛いですね。」
部員A「顔がサーボ丸出しなので新しい顔が欲しいところ(笑)」
部員B「せっかく立ち上がったので、ダンスでも踊らせたくないですか?」
クドウ「でも説明書がないし・・・。」
部員A「じゃあ、調べながらプログラミングしますか。」
ということで次回は、マイコンボードの制御をする予定です。みなさまお楽しみにー!
最後までお読みいただきありがとうございました。
現在、芳和システムデザインでは新しい仲間を募集しています。
ロボットを作ってみたいなど、ご興味がございましたらお気軽にお問合せください。
採用についてはこちらからどうぞ
お問合せ先
![]()