こんにちは、総務の工藤です。
当社にはメカやものづくりが好きな社員が集まるサークル、ロボット部があります。
最近、その部に近藤科学が出しているロボット「KXR-L2」がきたので前回のブログで組み立て方法を紹介しました(その様子はこちら)
さてロボットを組み立てたあとは・・・動かしたいですよね?
でもプログラムとか出来ない!と心配になった方(私)大丈夫です。
近藤化学のソフトウェア「Heart To Heart」があればすぐに動かせます。
ソフトウェア「HeartToHeart」の使い方
Heart To Heartでロボットの操作が簡単に行える
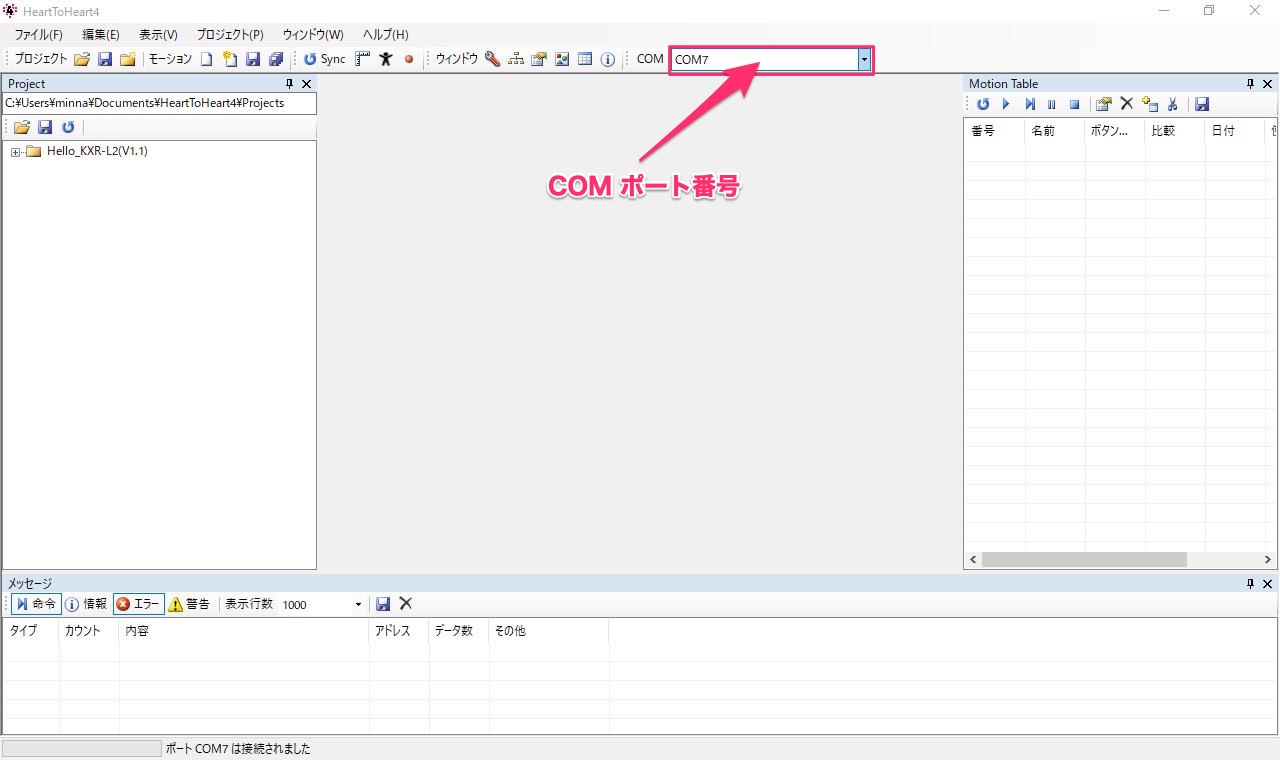
まず前回インストールした「Heart To Heart」を起動します。
そして画面上部、COMの隣にあるバーをクリックすると「COM”割り当てられた数字”」が表示されるのでそれを選択します。
この”数字”はPCによって違うので、分からない場合はPCの「スタート」から「デバイスマネージャー」というツールを呼び出してください。
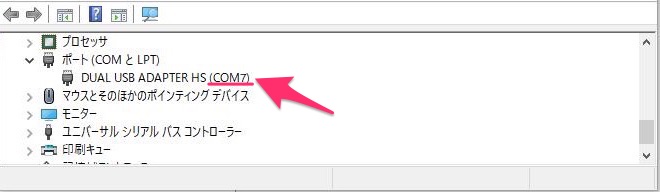
ヒューレットパッカードWindows10のデバイスマネージャー
デバイス一覧の中に「ポート(COMとLPT)」があるのでそれをクリックすると「DUAL USB ADAPTER HS」の末尾に小さく数字がふってあるのでその数字が割り当てられた数字になります。
またこの作業はPCとロボットがつながっているポートはここにあって、このポートを使ってプログラム(命令)を送信する、という設定作業です。
既存のモーションを新規で作成しましょう
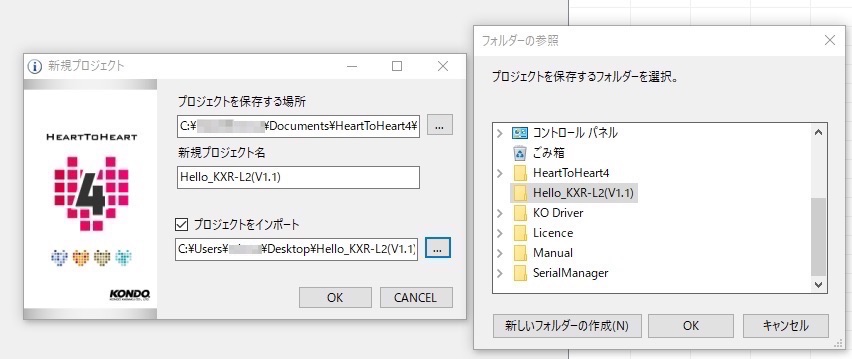
次に上部の「ファイル→新規作成→プロジェクト」の順に選択すると、新規プロジェクトのウィンドウが開きます。
項目の中に「プロジェクトをインポート」があるのでバーをクリックして前回インストールしたフォルダに入っている「Hello_KXRL2」を選択して「OK」をクリック。
そして設定変更がないのなら、新規プロジェクトの「OK」を最後にクリックします。
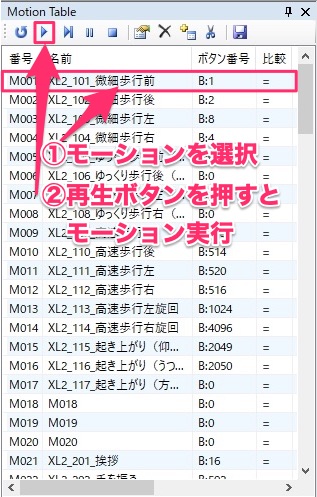
Motion Tableでどんなアクションができるか確認できる
すると画面上に「Motion Table」のウィンドウが開きます。
これはサンプルとして用意されたモーション(テーマに合わせた一連の動き)の一覧です。
どれか選択して「▶︎」の再生ボタンを押すとテーマに合わせた動きをロボットがしてくれます。
このサンプルはいろんな種類があって、歩くという基本的な動作から「腕立て伏せ」や「がっかり」など面白いものがはいっているで是非、ポチポチっと再生してみてください。
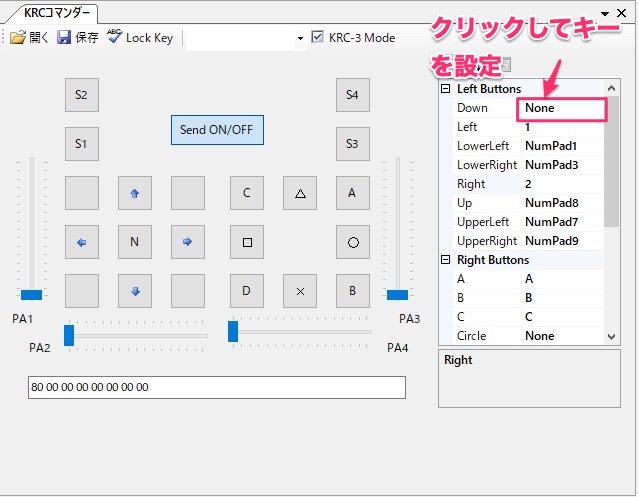
KRCコマンダーの設定画面
お次は「KRCコマンダー」と呼ばれるツールで、ボタンを押した時に選んだモーションが再生されるキー割り当てとモーション確認ができます。
別売りの無線コントローラーがあればここでボタンの設定が可能です。
画面上部の「ウィンドウ→KRC Commander」を選んで「KRCコマンダー」を開きます。
そして「Down」の隣をクリックするとキーを割り当てるウィンドウが表示されるのでお好きなキーを設定してください(今回はキーボードで設定)
最後に「Send ON/OFF」を押してボタンを押すとモーションが再生されます。
さらにオリジナルの動きを設定できるツールがあるのですが、それはまた次回にご紹介したいと思います。
実際に動かしてみると、意外と素早いのでツルツルした机の上だと豪快に足を滑らせて倒れます(笑)
でも転倒を繰り返すと故障の原因になるので、カーペットなどの上で動かすことを強くお勧めします。
それでは次回もお楽しみに〜。
※おいおい、次回まで待てないYO!という方はHeart To Heartの「ユーザーズマニュアル(PDF)」をご覧ください。