こんにちは、総務のクドウです!
毎度おなじみ社内サークル活動「ロボット部」では今日も、ものづくり好きな社員が集まって楽しい開発をしています。
前回は、ロボットを説明書無しでコツコツ組み立て、さぁ!次はマイコンボードの制御じゃーっというところまで作りました。
しかしその後、出来上がったロボットを前に「とりあえず手足動かしたくない?」>賛成!という流れに。
どう動かそうかと考えていた時、とある社員がググってソフトウエアを見つけてきました。
「RobotControl」というソフトなのですが、あまりにも簡単にサクっと動かせたので皆さんにご紹介したいと思います。
それでは早速、ソフトウェア「RobotControl」を使用して動かしていくぞー。
(ちなみにロボットはLewan Soul社製の「Humanoid Robot」を使用しています)
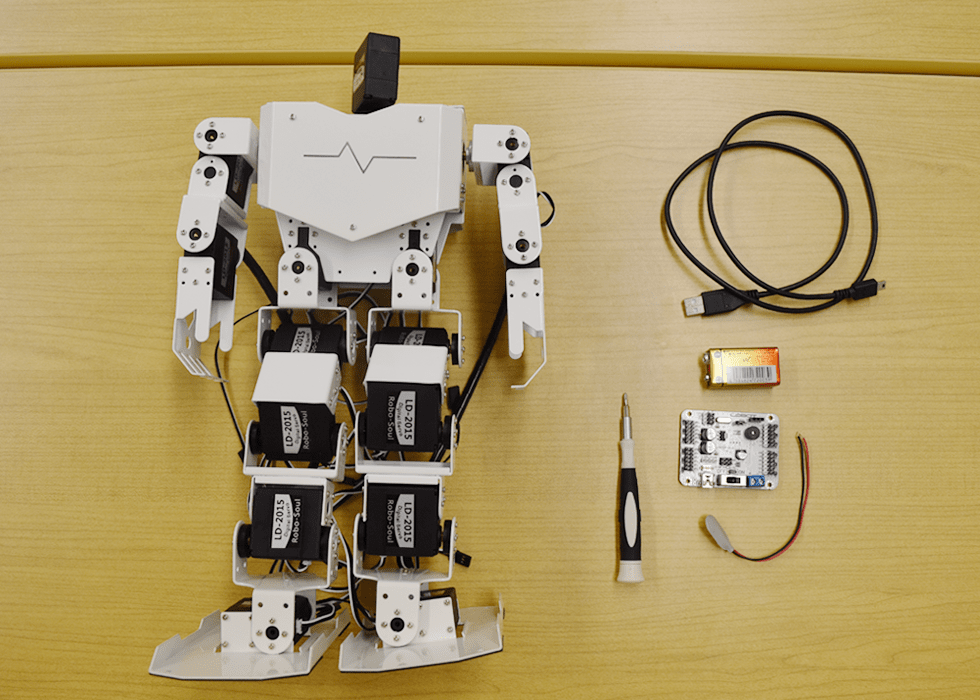
【最初に用意するもの】
・ロボット
・microUSBケーブル
・9Vの乾電池
・9Vバッテリースナップ
・マイコン(LSC-24 24 Channel Servo Controller)
・精密プラスドライバー
・PC(OSはWindows 8)
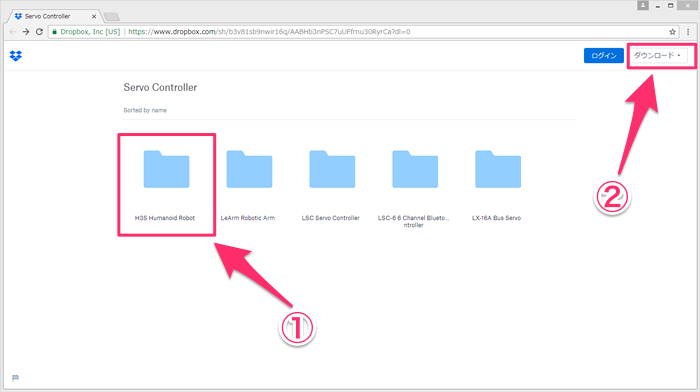
1.まず初めにこちらをクリックして「H3S Humanoid Robot」をダウンロードしてください
(アクセス先はオンラインストレージサービスdropboxです)
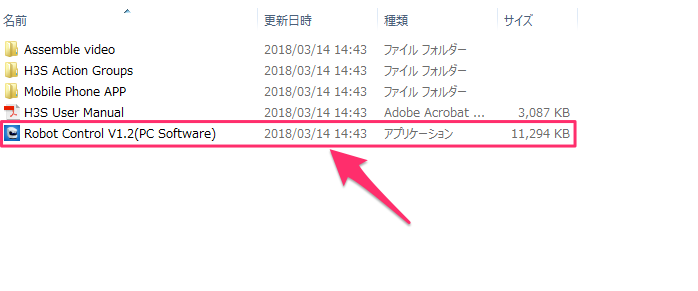
2.そしてダウンロードした圧縮ファイルを展開し、フォルダ内の「Robot Control V1.2」をクリックして起動します
3.起動すると下記の画面が出ますので、次は画面を見つつ、マイコンとサーボを繋げます
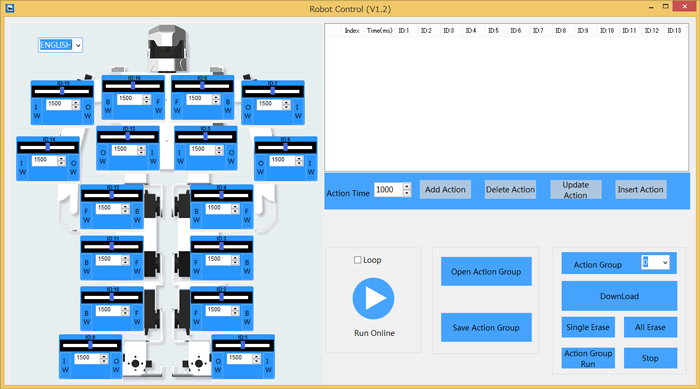
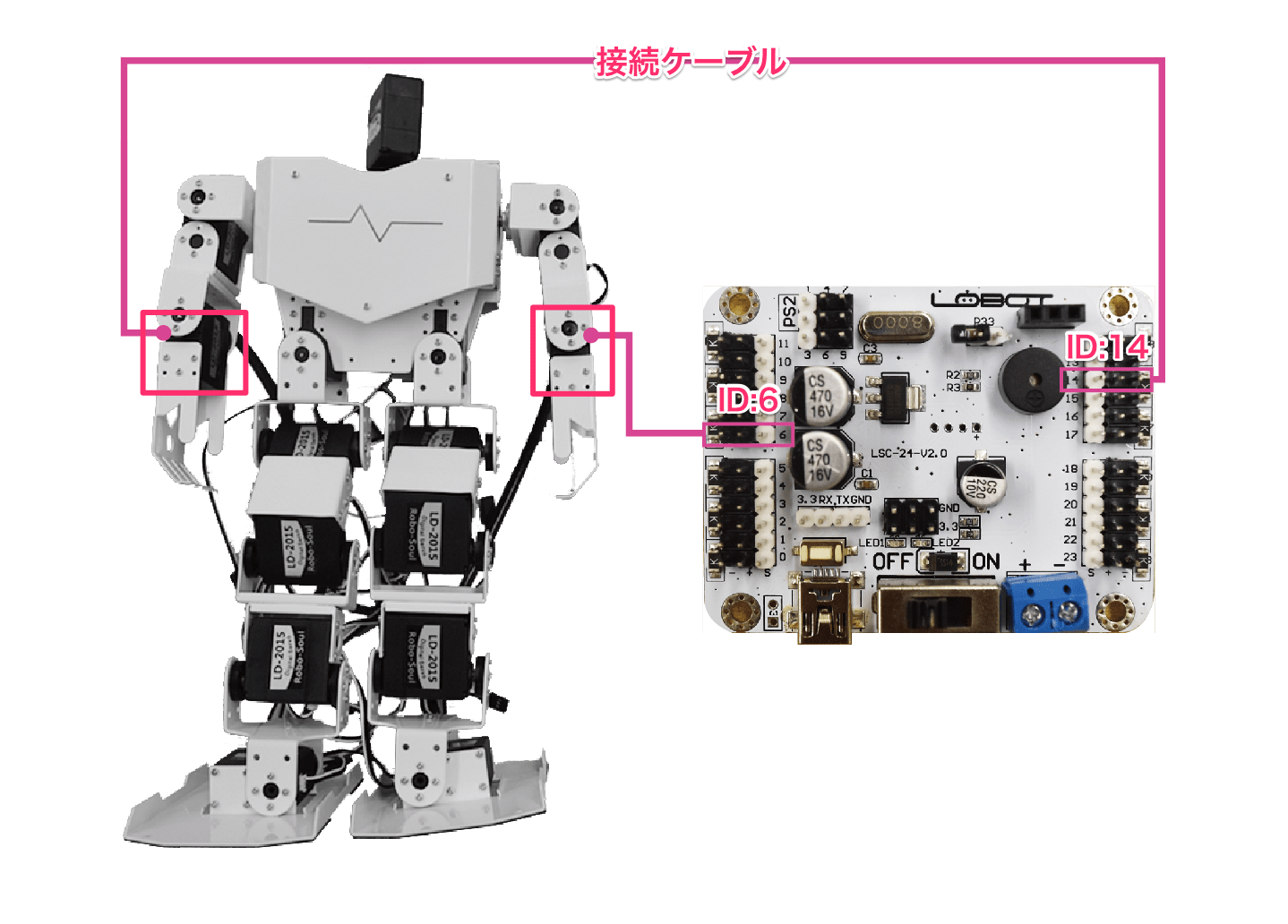
4.画面上のロボット関節に配置されているボックス(サーボモータを表している)にID:1〜16まで番号が振られていますので、この番号を元にサーボの接続ケーブルとマイコン上の番号を合わせて接続します
今回はお試しで、「ID:6」と「ID:14」(左手、右手)をマイコンと接続させます
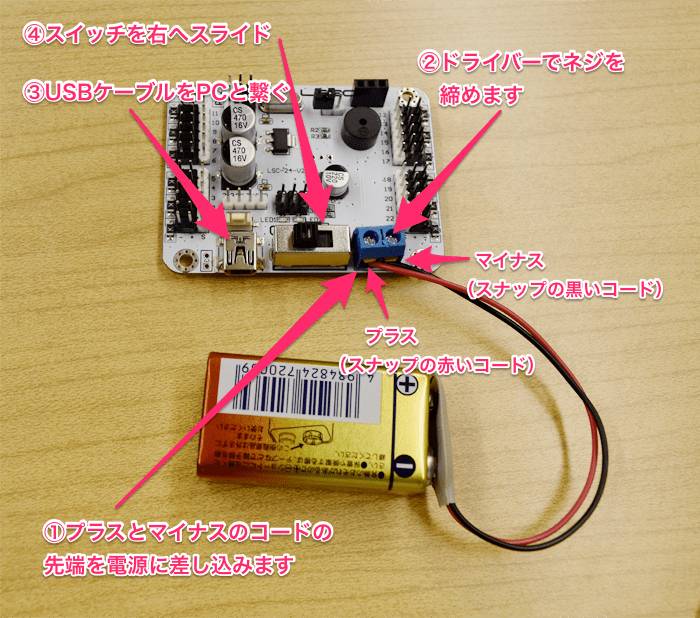
5.マイコンに電源として9V電池をつけるため、先にスナップをドライバーを使って電源に取り付けます
そして電池をスナップに取り付け(スナップコードが抜けないか確認し)microUSBケーブルでマイコンとPCを繋げ、最後にロボットを直立させ、マイコンのスイッチをON!
6.スイッチをつけると画面上のロボットの目が緑色に点灯!※(なにこの小粋な演出)
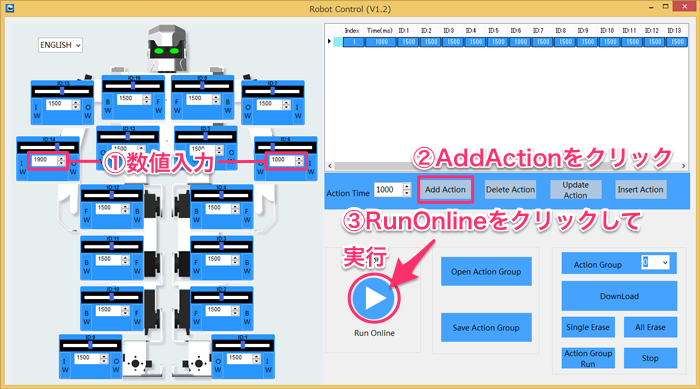
あとは「ID:6」と「ID:14」のサーボを動かしたい方向に合わせて数値入力し「Add Action」ボタンを押すと動きがストックされ、(この状態でもうサーボは動いてます)2個以上アクションをストックして「Run Online」を押すと実行されます
(※スイッチをつけてロボットの目が光らなければ、ソフトを終了させ、もう一度起動してください)
試しに手をプラプラさせてみましょうか
▼が実際に動かした動画です、ロボットがワクワクしてるみたいでかわいいですね
最後に
最後までお読みいただきありがとうございました。今回使用した「Robot Control V1.2」はロボットが簡単にサクッと動くので皆さんも是非遊んでみてください。
実際に動かしてみたい!という方はお気軽にご連絡ください、一緒にダンスの振り付けでも研究ましょう。
ではでは!