こんにちは、総務のクドウです。
最近、社内のエンジニアから「ロボット部のブログが更新されていない、これはもしや廃部したのでは?」という部を心配する声をいただきました。
大丈夫です、ちゃんと活動しています。
今まで何をしていたかというと、新しいヒューマノイド型ロボット「KXR-L2」を組み立て、遊んでいました。
こちらは近藤科学が出しているロボットで、専用のソフトウェア「Heart To Heart」でオリジナルの動きが自由に作れます。
本体にさらにオプションパーツのジャイロ(角速度センサー)を付ければ姿勢の自動補正を行い、安定した歩行が可能になります。
あと加速度センサーもあると3方向の転倒を検出することが出来るのであると便利です。
早速、ロボットがきたので!今日はKXR-L2を組み立てた手順を一通りご紹介したいと思います。
組立てる
まずパソコンと工具を用意します。
・ 対応OS:Windows Vista、Windows7 、8 、 8.1 、 10
・プラスドライバーの0番と1番
・ハサミ(部品に付けるシールを切るため)
近藤科学のこちらのサイトに最新のソフトウェアと組立説明書が公開されていますので、パソコンにダウンロードしておきましょう。
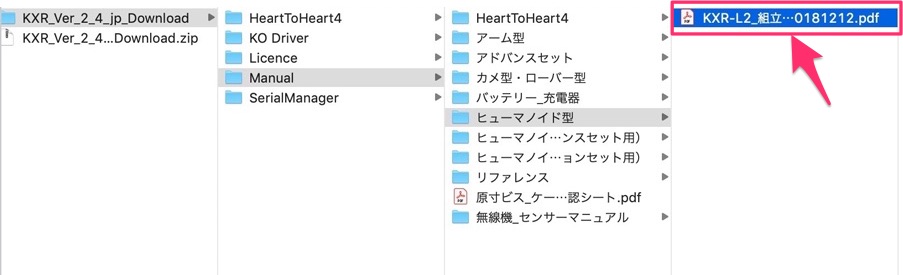
ダウンロードしたフォルダの中に組立説明書がある
そしてプラスドライバーと部品を机に並べたら組立説明書通りに組立てます。
ちなみにこの作業にかかった時間は9時間ほど。
ひたすら精密ビスでのねじ締めが続くので休憩を入れつつ、気長にコツコツやりましょう。
クドウは組立てに没頭しすぎて休憩なしで作業をしたら、意識がもうろうとして手に何度かドライバーの先を回転させて悲鳴をあげていました(新手の拷問かな?)
皆さんもお気をつけください。
組み立ての際、特に気をつけないといけないのがサーボの原点です、この原点からユーザーが角度入力した位置まで回転させて動く仕組みなので原点とサーボを合わせないと予期せぬ方向に動き、部品を壊してしまうかもしれません。
ここでもクドウはサーボを間違えて取り付けたので、関節部分に人差し指を挟まれて痛い思いをしました。
これでしばらくエレベーターの階数ボタンがこの指で押せなくなりましたが2度と同じ過ちは犯さないでしょう(毎回痛みで物を覚える体質のようです)
このように命令された通りに動く反面、人間が結果を予測して組み立てないとクドウみたいに失敗します。
ソフトウェアを用意する
続いては「Dual USB アダプターHS」についているボタンをシリアルモードにスライドさせて、パソコンに接続します。
接続した時にLEDが緑色に点灯します。
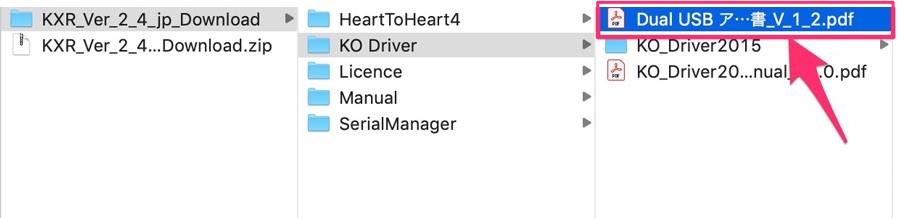
フォルダ内のDual USB アダプターHS取扱説明書を開く
先ほどダウンロードしたフォルダに「Dual USB アダプターHS 取扱説明書」があるのでこれを見ながらドライバーをインストールしましょう。
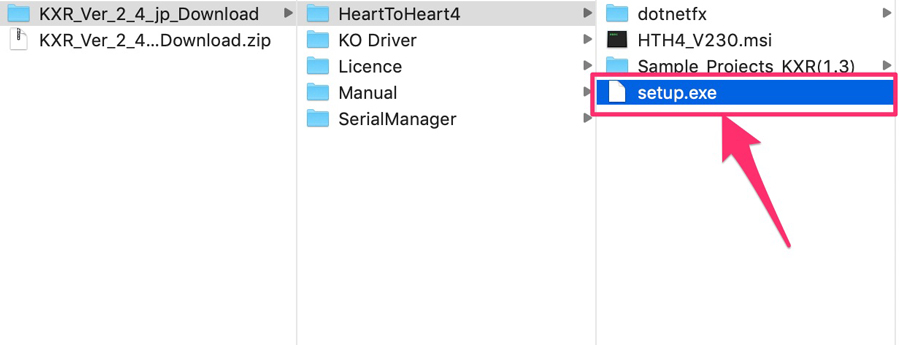
ソフトウェアをダウンロードします
次にロボットを動かすソフトウェア「Heart To Heart4」のsetup.exeを起動し、組立説明書の説明通りに設定します。
設定が終わると電源を入れたロボットが「ホームポジション」と呼ばれる直立姿勢になります。
もし姿勢が直立にならなかったり、関節が左右非対称の動きをしていたらサーボの原点がズレているのでビスを外して組み直しましょう。
もし思うように動かなくて行き詰まってしまったら、近藤科学が行なっているロボットスクールがあるので受講してみてください。
実際に稼働するところまで親身に教えてくれるのでおすすめですよ。
それでは次回はロボットの動かし方を解説します、どうぞお楽しみに〜!